本資料は2020年10月10日に社内共有資料として展開していたものをWEBページ向けにリニューアルした内容になります。
■Object Pose Estimation
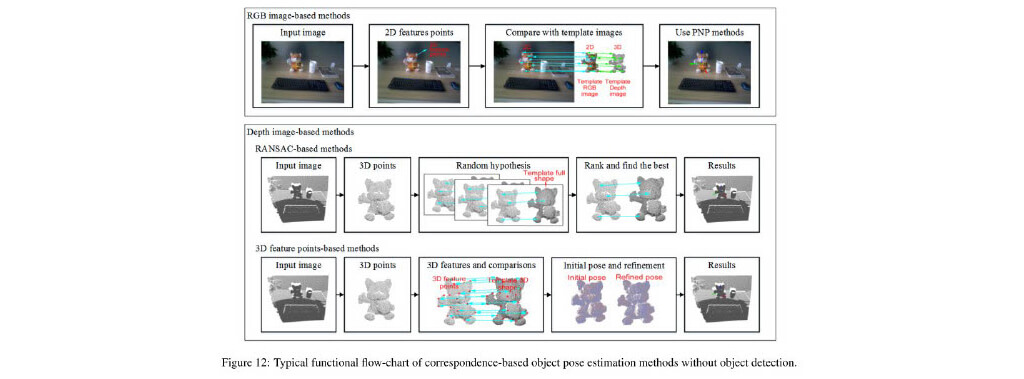
- Correspondence-based method : Find Correspondences between 2D points and 3D points (PnP, ICP)
- Template-based method: Extract the gradient information for matching, and refined(ICP)
- Voting-based method: Every local predicts a result, and refined using RANSAC
- Regression-based method: Represent pose suitable for CNN
■Summary of 6D pose estimation methods
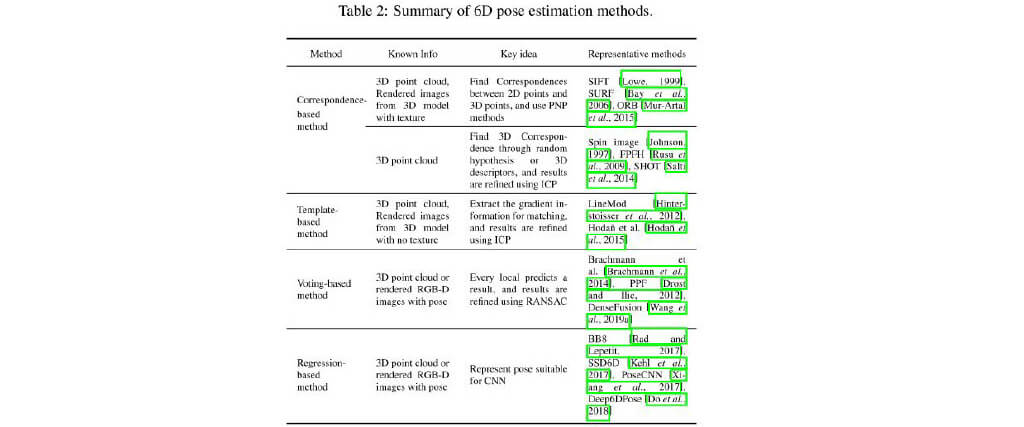
Arxiv:1905.06658
■Correspondence-based method
With rich textures to get image features
Arxiv:1905.06658
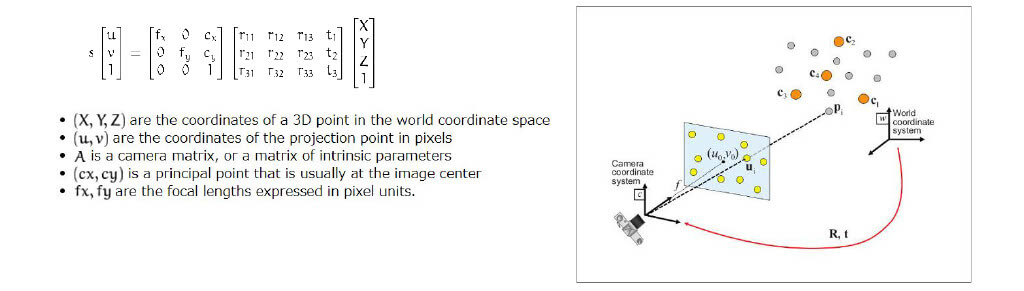
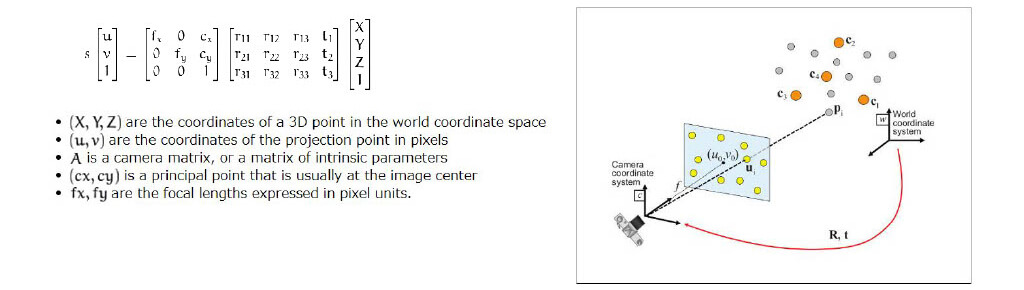
■PnP solver
Estimate extrinsic camera parameter using known 3D points in a world coordinate
There are many many solvers (e.g. P3P, P5P.., using RANSAC or Eigen value decomposition)
Arxiv:1905.06658
■ICP algorithm
Iterative matching for 2 point clouds
- Correspondence nearest neighbor points
- Translate a point cloud set to match the other sets
- iteration above

■ICP
Estimate extrinsic camera parameter using known 3D points in a world coordinate There are many many solvers (e.g. P3P, P5P.., using RANSAC or Eigen value decomposition)
Arxiv:1905.06658
■SegICP SegNet
SegICP
Segmentation and depth image-based partial Registration to obtain object’s pose
SegNet
Multi-hypothesis object pose: Point-to-point ICP
1cm pose error and < 5°error

■Template-based method
Using gradient information in RGB-D or RGB image Without rich texture
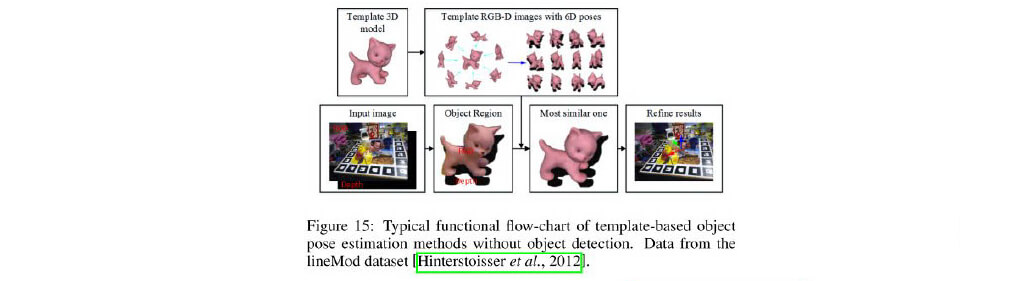
ICP

Arxiv:1905.06658
■Voting-based method
Objects with occlusions Dense class labeling
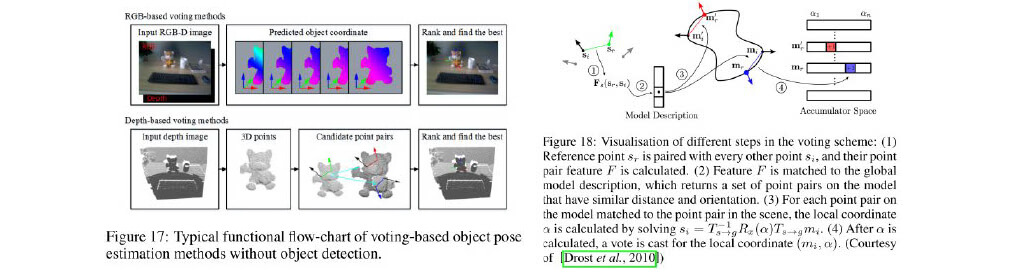
Arxiv:1905.06658
■Regression-based method
PoseCNN
- Localizing the center of objects
- Predicting its distance from camera
- Regressing rotation to a quarternion

PoseCNN architecture
- Feature extraction
- Embedding
- Classification and regression
Two loss function for quaternion
- PoseLoss
- ShapeMatch-Loss

DeepIM
Iterative refinement using DNN
Enable to combine other estimator
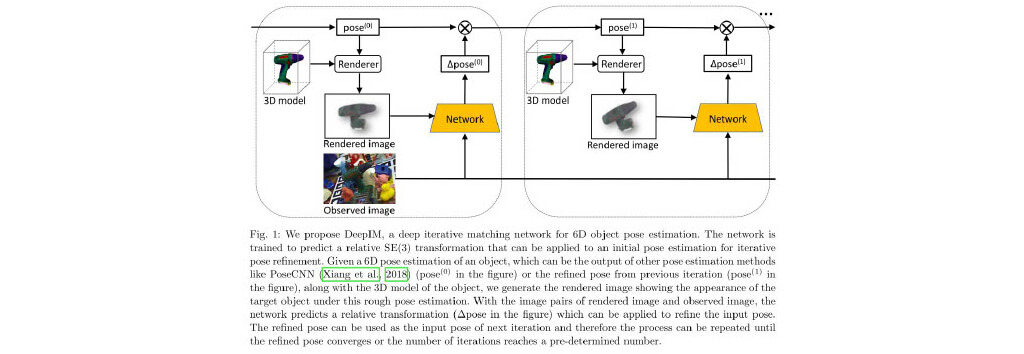
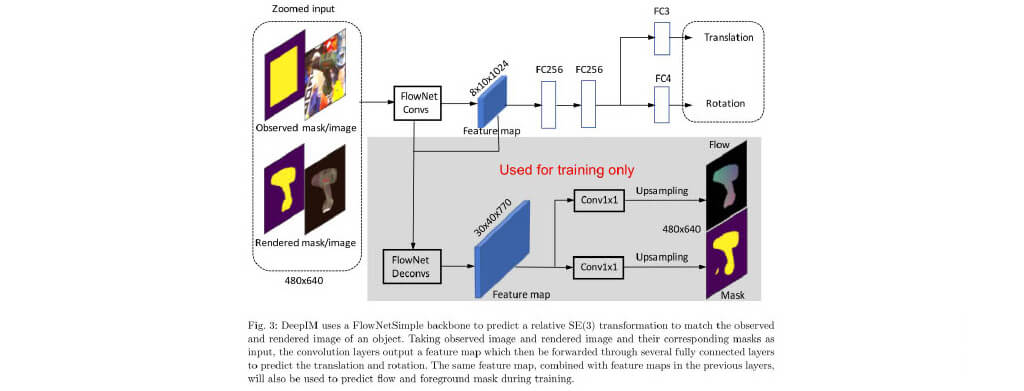
DeepIM
Iterative refinement using DNN
Flownet: estimate optical flow
CullNet
Single view image-based object pose estimation
Culling false positives Calibrate the confidence score
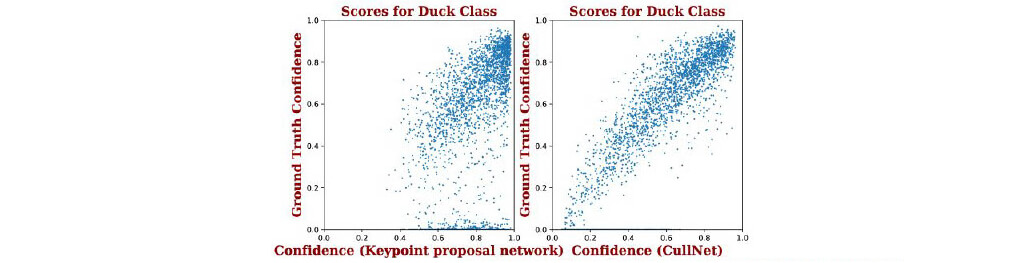
■Correspondence-based and Regression-based method

CullNet Architecture
Using Yolov3 for keypoints
Cullnet output confidence of objects pose by PnP.
■Voting-based and Regression-based method
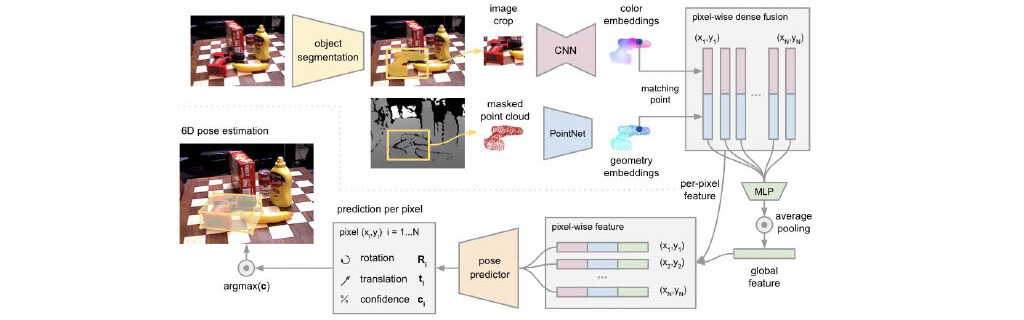
DenseFusion
Estimating 6D pose of known objects
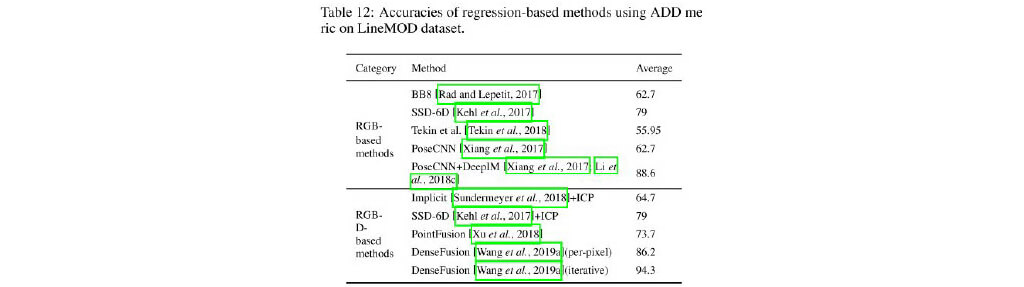
■Comparison
ADD (Average Distance of Model Point)
ADD-S (for symmetric objects
Error smaller than threshold(< 2cm)

From the tables, we can see that DenseFusion achieved the highest accuracy comparing with other regression-based methods. novel local feature fusion scheme using both RGB and depth images